Delta Arrays
Dexterous manipulation capabilities of end-effectors afford us a wide range of strategies for fine-grained manipulation tasks. Recent utilization of readily available materials like soft filaments and silicone elastomers has enabled the development of low-cost mechanically intelligent robotic manipulators. This is important for democratizing robot manipulation and increasing accessibility in robotics. However, these robots generally have complex non-linear dynamics that are hard to model analytically, and even harder to learn numerically in the real world in a sample efficient manner. Towards these challenges, we propose a novel manipulator for exploring the capabilities of a complex multi-robot dexterous manipulation system and accessible hardware that can leverage these algorithms to accomplish a wide variety of tasks.
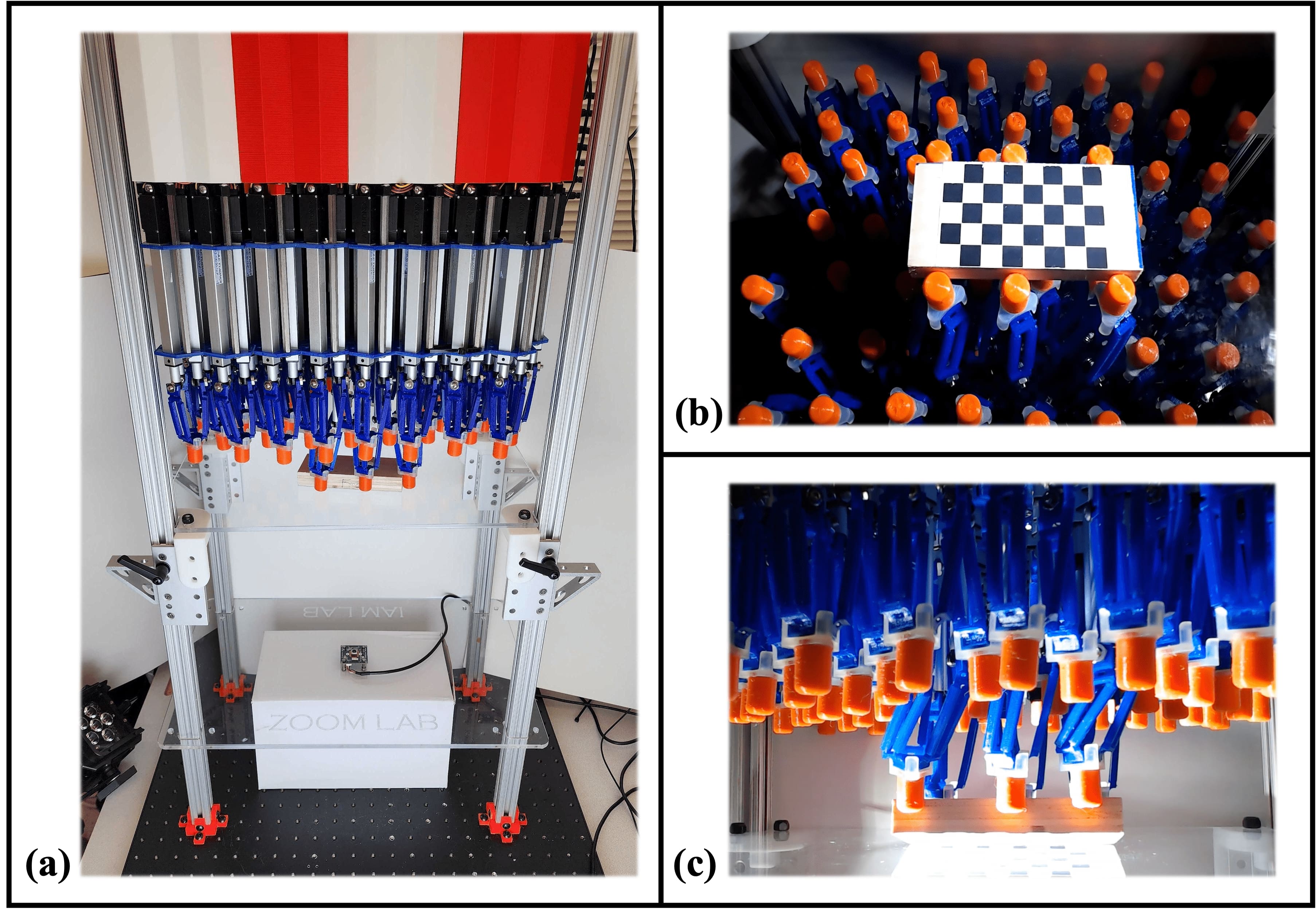
We present an array of 64 linear soft delta robots in an 8x8 hexagonal grid, for the development of new manipulation paradigms that can learn complex prehensile and non-prehensile skills in the real world. The 3D-printed soft TPU links provide mechanical compliance and allow collisions without harming the end-effector. We demonstrate dexterous manipulation capabilities of the delta array using reinforcement learning while leveraging the compliance to not break the end-effectors. Our evaluations show that the resulting 192 DoF-compliant robot is capable of performing various coordinated distributed manipulations of a variety of objects, including translation, alignment, prehensile squeezing, lifting, and grasping.
For more information, please contact Sarvesh.
Relevant publications
DeltaZ: An Accessible Compliant Delta Robot Manipulator for Research and Education.
Sarvesh Patil; Samuel C. Alvares; Pragna Mannam; Oliver Kroemer; F. Zeynep Temel. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022.
Springtail µBot
Springtails are tiny arthropods that crawl and jump. They jump by temporarily storing elastic energy in resilin elastic cuticular structures and releasing that energy to accelerate a tail, called a furca, propelling them in the air. We present an autonomous, springtail-inspired microrobot that can crawl and jump. The microrobot has a mass of 980mg and stands 13mm tall, and has on-board sensing, computation, and power, enabling autonomy. The microrobot was designed with a super-elastic shape memory alloy (SMA) spring that is manually loaded to store elastic energy. The on-board sensing and computation triggers an actuator at the jump frequency range that unlatches the spring, launching the microrobot into the air at speeds up to 3.171 m/s. At the same time, the microrobot is capable of crawling, when actuated at frequencies lower or higher than the jump frequency range, demonstrating autonomous multimodal locomotion.
Relevant publications
DeltaHand
DeltaHand is a synergistic robotic hand platform for dexterous manipulation. By leveraging the modularity of Delta robots, our hands are easy to configure to different degrees of freedom with actuation synergies. The manufacturing is low cost by using off-the-shelf materials (the robot can be manufactured in less than a day and costs under $800). We use soft Delta links for the fingers, and show that our hands can compliantly and safely interact with the environment.
We demonstrate grasping of daily objects using our hand prototypes and teleoperating a 9-actuator Delta hand with a Franka robot arm for dexterous manipulation tasks, we show that we can easily control our hands by leveraging the synergy of our hands while maintaining the necessary dexterity.
Relevant publications
Rescue Rollers
Rescue Rollers are centimeter scale robots designed to operate in unstructured environments. We are exploring how we can achieve robust locomotion with robots of this size after natural disasters. By leveraging their size and a suite of sensing capabilities, a swarm of Rescue Rollers can help first-responders safely and efficiently locate and recover survivors.
Rescue Rollers are also part of a symbiotic system with vine robots. They provide steering and enhanced sensing capabilities, while the vine robots allow for efficient large scale locomotion and power for the centi-robots.